10/03/2006
En el mundo del desarrollo de videojuegos y gráficos por computadora, representar y manipular la orientación de objetos en un espacio tridimensional es una tarea fundamental y omnipresente. Tradicionalmente, los desarrolladores han recurrido a métodos como las matrices de rotación o los ángulos de Euler (yaw, pitch, roll). Sin embargo, estos enfoques, aunque funcionales, vienen acompañados de problemas notorios como el temido gimbal lock, la complejidad en la interpolación y una mayor carga computacional. Es aquí donde emerge una solución matemática más elegante, eficiente y robusta: los cuaterniones. Aunque su nombre pueda sonar intimidante y su base matemática abstracta, entender su aplicación práctica es más sencillo de lo que parece y puede transformar por completo la forma en que manejas las rotaciones en tus proyectos.
¿Qué es un Cuaternión? Una Intuición para Desarrolladores
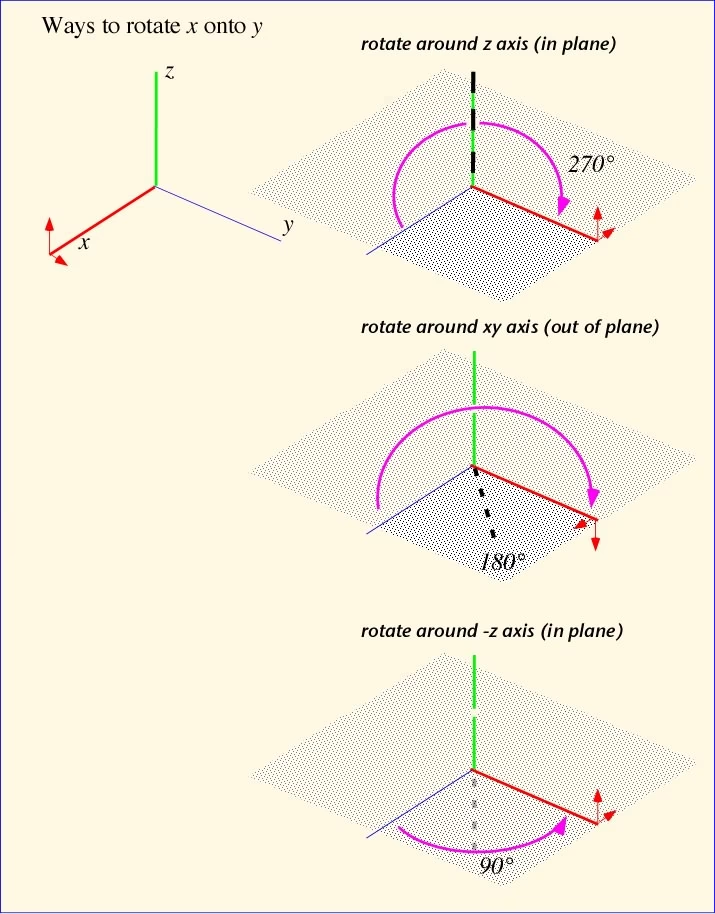
Imagina que quieres describir una rotación en el espacio. Lo más intuitivo es pensar en un eje de rotación (una línea imaginaria que atraviesa el objeto) y un ángulo que indica cuánto girar alrededor de ese eje. Sorprendentemente, un cuaternión encapsula exactamente esa información de una manera muy compacta.
Matemáticamente, un cuaternión es una extensión de los números complejos. Si un número complejo tiene una parte real y una imaginaria (a + bi), un cuaternión tiene una parte real y tres partes imaginarias (w + xi + yj + zk). Para nuestros propósitos en gráficos 3D, podemos visualizarlo de una forma mucho más práctica:
- Un número de 4 dimensiones: (w, x, y, z)
- O, aún mejor, una combinación de un escalar (w) y un vector 3D (x, y, z)
La magia reside en cómo estos cuatro números se relacionan con la representación de eje-ángulo. Un cuaternión unitario (un cuaternión cuya magnitud es 1) que representa una rotación de un ángulo θ alrededor de un eje unitario (ux, uy, uz) se construye de la siguiente manera:
w = cos(θ / 2)x = ux * sin(θ / 2)y = uy * sin(θ / 2)z = uz * sin(θ / 2)
Como puedes ver, la parte escalar w está relacionada con el coseno del semiángulo, mientras que la parte vectorial (x, y, z) representa el eje de rotación, escalado por el seno del semiángulo. Esta estructura es la clave de su poder.
¿Por Qué Usar Cuaterniones? Las Ventajas Clave
Adoptar cuaterniones en lugar de otros métodos no es un capricho académico; ofrece beneficios tangibles y cruciales en el desarrollo de juegos y aplicaciones 3D.
1. Adiós al Temido "Gimbal Lock"
El gimbal lock es un problema catastrófico que ocurre al usar ángulos de Euler. Cuando uno de los ejes (por ejemplo, el pitch) alcanza los +/- 90 grados, los otros dos ejes (yaw y roll) se alinean, perdiendo un grado de libertad. Esto provoca que el objeto no pueda rotar en una dirección, resultando en movimientos bruscos y no deseados, especialmente en cámaras de vuelo o simuladores. Los cuaterniones, al operar en un espacio de 4 dimensiones, no tienen ejes fijos que puedan alinearse de esta manera, evitando por completo el problema del gimbal lock.
2. Interpolación Suave y Natural (SLERP)
Una de las tareas más comunes es animar una rotación de una orientación A a una B. Con ángulos de Euler, interpolar linealmente cada ángulo por separado produce trayectorias extrañas y antinaturales, donde la velocidad de rotación no es constante. Los cuaterniones solucionan esto con una operación llamada Interpolación Lineal Esférica (SLERP, por sus siglas en inglés). SLERP encuentra el camino más corto sobre la superficie de una hiperesfera 4D, garantizando una rotación suave, directa y a velocidad constante entre dos orientaciones. Esto es esencial para animaciones de personajes, cámaras y cualquier objeto que necesite moverse de forma creíble.
3. Eficiencia y Estabilidad Numérica
La eficiencia es vital en tiempo real. Un cuaternión solo necesita 4 números de punto flotante para almacenar una rotación. Una matriz de rotación de 3x3, en cambio, requiere 9. Al componer (combinar) múltiples rotaciones, multiplicar dos cuaterniones es computacionalmente más barato que multiplicar dos matrices de 3x3. Además, debido a errores de redondeo, las matrices pueden dejar de ser ortogonales con el tiempo, lo que introduce escalado o cizallamiento no deseado. Normalizar un cuaternión para corregir estos errores es una operación simple y rápida, mientras que re-ortogonalizar una matriz es mucho más costoso.
Comparativa de Representaciones de Rotación
Para tener una idea clara de las diferencias prácticas, aquí tienes una comparación directa entre los métodos más comunes.
Tabla de Requisitos de Almacenamiento
| Método | Almacenamiento (números) |
|---|---|
| Matriz de Rotación (3x3) | 9 |
| Cuaternión | 4 |
| Eje-Ángulo | 4 |
| Ángulos de Euler | 3 |
Tabla de Rendimiento Computacional
| Operación | Matrices (Multiplicaciones / Sumas) | Cuaterniones (Multiplicaciones / Sumas) |
|---|---|---|
| Componer Rotaciones | 27 / 18 | 16 / 12 |
| Rotar un Vector | 9 / 6 | 15 / 15 |
Aunque rotar un solo vector puede parecer más costoso con cuaterniones a primera vista, la composición de rotaciones (una operación muy frecuente) es significativamente más rápida, lo que a menudo resulta en una ganancia neta de rendimiento.
Operaciones Clave en el Desarrollo de Juegos
Entender la teoría es una cosa, pero aplicarla es lo que cuenta. Aquí tienes las operaciones más comunes que realizarás con cuaterniones.
Rotación Local vs. Global (Mundo)
Este es un punto que a menudo confunde a los principiantes. El orden de la multiplicación de cuaterniones importa, ya que no es conmutativa (q1 * q2 ≠ q2 * q1). Este hecho se aprovecha para distinguir entre rotaciones en el espacio local del objeto y en el espacio del mundo.
- Rotación en Espacio Local: Para aplicar una rotación relativa a la orientación actual del objeto (por ejemplo, girar el personaje a su propia derecha), se post-multiplica.
nuevaOrientacion = orientacionActual * rotacionLocal. - Rotación en Espacio Global: Para aplicar una rotación con respecto a los ejes del mundo (por ejemplo, girar el objeto alrededor del eje Y global), se pre-multiplica.
nuevaOrientacion = rotacionGlobal * orientacionActual.
El Cuaternión Identidad y la Inversión
- Identidad: El cuaternión
(1, 0, 0, 0)representa "ninguna rotación". Es el equivalente al número 1 en la multiplicación escalar. Multiplicar cualquier cuaternión por la identidad no lo altera. - Inversión: Para obtener la rotación opuesta, simplemente se niega la parte vectorial del cuaternión (o se calcula su conjugado). Si
q = (w, x, y, z), su inversoq⁻¹es(w, -x, -y, -z). Aplicarqy luegoq⁻¹devuelve el objeto a su estado original.
Rotar un Vector
Para rotar un punto o vector v usando un cuaternión q, se utiliza la fórmula de sándwich: v_rotado = q * v * q⁻¹. Aquí, el vector v se trata momentáneamente como un cuaternión con parte real cero: (0, vx, vy, vz). El resultado de esta operación también será un cuaternión con parte real cero, y su parte vectorial contendrá las coordenadas del vector ya rotado.
Preguntas Frecuentes (FAQ)
- ¿Qué es un cuaternión en términos simples?
- Es una herramienta matemática de 4 números que representa una rotación 3D a través de un eje y un ángulo. Piensa en él como una forma compacta y eficiente de almacenar una orientación.
- ¿Cuál es la principal ventaja de los cuaterniones sobre los ángulos de Euler?
- La principal ventaja es que evitan por completo el problema del "gimbal lock", lo que permite rotaciones robustas en cualquier dirección sin perder grados de libertad.
- ¿Qué cuaternión representa "ninguna rotación"?
- El cuaternión identidad, que es (1, 0, 0, 0). Su parte real es 1 y su parte vectorial es cero.
- ¿Cómo se combinan dos rotaciones con cuaterniones?
- Simplemente multiplicándolos. Si quieres aplicar la rotación A y luego la rotación B, el cuaternión combinado es
C = B * A. El orden es importante. - ¿Son difíciles de aprender los cuaterniones?
- La matemática subyacente es compleja, pero para usarlos en un motor de juegos no necesitas entenderla a fondo. Solo necesitas saber qué funciones de la API usar para crear, combinar e interpolar rotaciones. La mayoría de los motores modernos (Unity, Unreal, Godot) abstraen la complejidad y te permiten aprovechar su poder fácilmente.
En conclusión, aunque la curva de aprendizaje inicial pueda parecer empinada, invertir tiempo en comprender el uso práctico de los cuaterniones es una de las mejores decisiones que un programador de gráficos o de videojuegos puede tomar. Aportan robustez, eficiencia y fluidez a tus rotaciones, resolviendo problemas que han frustrado a desarrolladores durante décadas.
Si quieres conocer otros artículos parecidos a Cuaterniones: La Guía Definitiva de Rotación 3D puedes visitar la categoría Juegos.